Merhaba,
Bir quadcopter projesi üzerinde çalışıyorum, ancak daha başlangıç seviyesi olduğum için bazı sorularım var.
Kontrol kartı olarak Arduino Nano kullanmaya karar verdim. ESC'leri de BEC'siz seçtim ve Arduino'yu beslemek için 5V'luk bir switchmode regulatör kullanmaya karar verdim.
Bildiğim kadarıyla Arduino üzerinde zaten yerleşik bir lineer regülatör var ancak (sanırım) switchmode'lar daha verimli olduğu için onu kullanmadım.
Ancak dediğim gibi bu konularda daha yeniyim ve bu şekilde çalışacağından emin olamadım.
Şu şekilde bir şema çizdim:
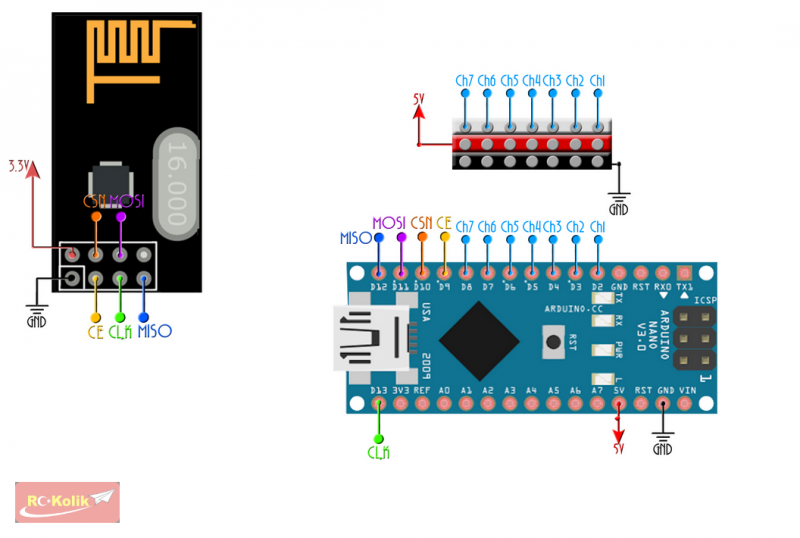
Arduino bağlantıları:
-Şemada da görülebileceği gibi 4S batarya kullanacağım.
-Kullanacağım batarya şu:
-Kullanacağım voltaj regülatörü şu:
-Kullanacağım motor şu:
-Kullanacağım ESC şu:
-Kullanacağım kontrol kartı şu:
Sorularım Şunlar:
-Bu devre ve içindeki elemanlar herhangi bir problem olmadan, istenilen biçimde çalışır mı?
-Eğer çalışırsa bu devreyi geliştirmek için ekleyebileceğim bir şey var mı?
Teşekkürler
Bir quadcopter projesi üzerinde çalışıyorum, ancak daha başlangıç seviyesi olduğum için bazı sorularım var.
Kontrol kartı olarak Arduino Nano kullanmaya karar verdim. ESC'leri de BEC'siz seçtim ve Arduino'yu beslemek için 5V'luk bir switchmode regulatör kullanmaya karar verdim.
Bildiğim kadarıyla Arduino üzerinde zaten yerleşik bir lineer regülatör var ancak (sanırım) switchmode'lar daha verimli olduğu için onu kullanmadım.
Ancak dediğim gibi bu konularda daha yeniyim ve bu şekilde çalışacağından emin olamadım.
Şu şekilde bir şema çizdim:
Bu RESMİ görmek için izniniz yok. Giriş yap veya üye ol
Arduino bağlantıları:
Bu RESMİ görmek için izniniz yok. Giriş yap veya üye ol
-Şemada da görülebileceği gibi 4S batarya kullanacağım.
-Kullanacağım batarya şu:
Bu LİNKİ görmek için izniniz yok. Giriş yap veya üye ol
-Kullanacağım voltaj regülatörü şu:
Bu LİNKİ görmek için izniniz yok. Giriş yap veya üye ol
-Kullanacağım motor şu:
Bu LİNKİ görmek için izniniz yok. Giriş yap veya üye ol
-Kullanacağım ESC şu:
Bu LİNKİ görmek için izniniz yok. Giriş yap veya üye ol
-Kullanacağım kontrol kartı şu:
Bu LİNKİ görmek için izniniz yok. Giriş yap veya üye ol
Sorularım Şunlar:
-Bu devre ve içindeki elemanlar herhangi bir problem olmadan, istenilen biçimde çalışır mı?
-Eğer çalışırsa bu devreyi geliştirmek için ekleyebileceğim bir şey var mı?
Teşekkürler