- Katılım
- 2 Ara 2015
- Mesajlar
- 47
- Tepkime puanı
- 39
- Yaş
- 29
- Konum
- Trabzon
- Web sitesi
- www.elektrobot.net
- İlgi Alanı
- Multikopter
Herkese merhaba,
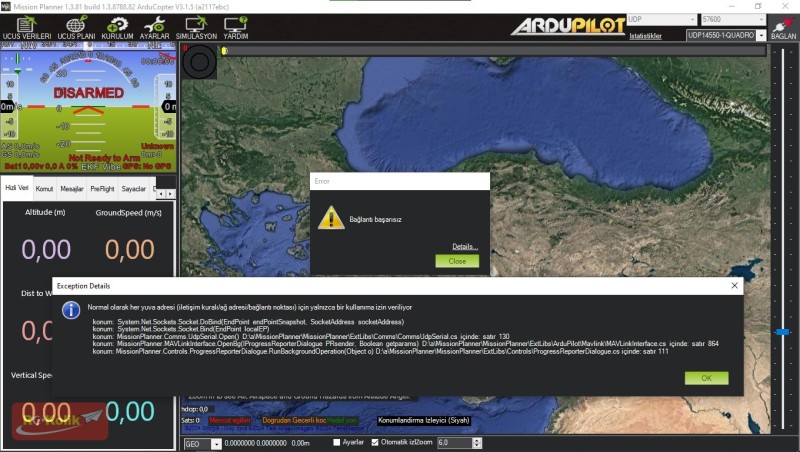
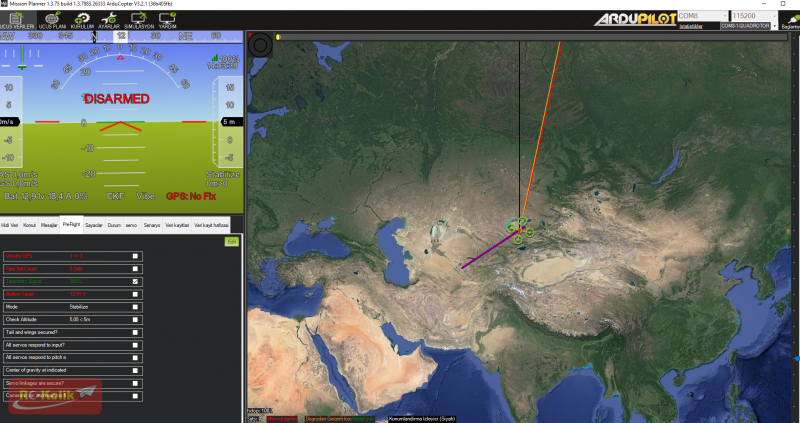
S500 sınfı bir Quadcopter' im var. Üzerinde pixhawk uçuş kartı ve çinden alınan ucuz GPS' lerden var. Drone' un bütün kalibrasyonlarını gerçekleştirdim. Alt-Hold motunda çok güzel ve stabil uçuyor. Ancak pos-hold modunda bazen batı yönünde kendi kendine hareket etmeye başlıyor. Bunu çok nadiren yapıyor. Ancak meydana geldiğinde son derece sinir bozucu bir durum. Mod' u Alt-hold' a alarak sorunu çözebiliyorum. Sonrasında Pos-hold' a aldığımda tekrar aynı yönde harekete başlıyor. İndirip gücü kesip tekrar başlatmam gerekiyor ki pos-hold' da uçabileyim. İnternette nerden kaynaklandığını aradım ama kesin bir çözüm bulamadım. Bu forumda da aradım ama bulamadım. Gözümden kaçtıysa affola yeniyim henüz. Uzun bir aradan sonra bugün bu sorunla karşılaşınca artık danışmak istedim birilerine.
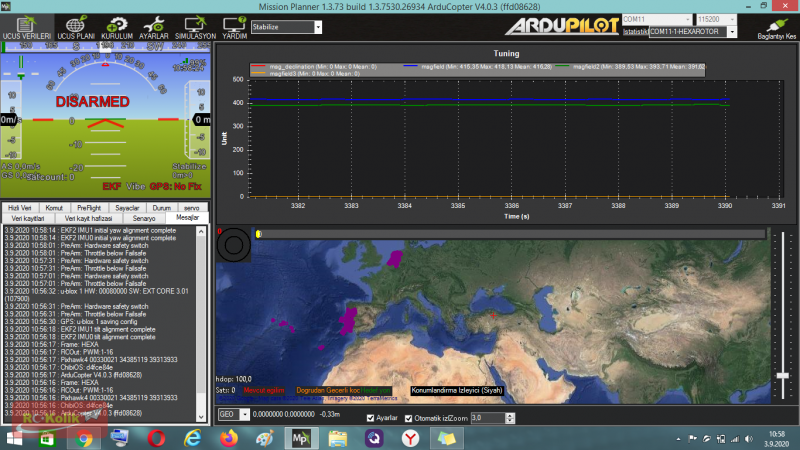
Drone' a ilk güç verdiğimde telemetri mesajlarında GPS modelini belirten bir yazı göremedim. Aşağıda ilk gelen telemetri mesajlarını ekledim. Ayrıca log dosyasını da
Şimdiden teşekkürler
S500 sınfı bir Quadcopter' im var. Üzerinde pixhawk uçuş kartı ve çinden alınan ucuz GPS' lerden var. Drone' un bütün kalibrasyonlarını gerçekleştirdim. Alt-Hold motunda çok güzel ve stabil uçuyor. Ancak pos-hold modunda bazen batı yönünde kendi kendine hareket etmeye başlıyor. Bunu çok nadiren yapıyor. Ancak meydana geldiğinde son derece sinir bozucu bir durum. Mod' u Alt-hold' a alarak sorunu çözebiliyorum. Sonrasında Pos-hold' a aldığımda tekrar aynı yönde harekete başlıyor. İndirip gücü kesip tekrar başlatmam gerekiyor ki pos-hold' da uçabileyim. İnternette nerden kaynaklandığını aradım ama kesin bir çözüm bulamadım. Bu forumda da aradım ama bulamadım. Gözümden kaçtıysa affola yeniyim henüz. Uzun bir aradan sonra bugün bu sorunla karşılaşınca artık danışmak istedim birilerine.
Drone' a ilk güç verdiğimde telemetri mesajlarında GPS modelini belirten bir yazı göremedim. Aşağıda ilk gelen telemetri mesajlarını ekledim. Ayrıca log dosyasını da
Bu LİNKİ görmek için izniniz yok. Giriş yap veya üye ol
ekledim. Arducopter' in 3.6.11 versiyonunu kullanıyorum çünkü yeni çıkan 4 versiyonunda uçuşda stabilite sorunları yaşadım ve versiyonu düşürdüm.
Kod:
10.06.2020 23:54:13 : EKF primary changed:0
10.06.2020 23:54:13 : EKF primary changed:1
10.06.2020 23:54:03 : PreArm: Hardware safety switch
10.06.2020 23:53:57 : Frame: QUAD
10.06.2020 23:53:57 : fmuv3 00390034 30375105 36383839
10.06.2020 23:53:57 : ChibiOS: ab2f8d8d
10.06.2020 23:53:57 : ArduCopter V3.6.11 (f0d59294)Şimdiden teşekkürler
- Kontrol Kartınız
- Pixhawk
- Model Sınıfı
- S500
- Motor, Pervane ve ESC
- 2212 980 Kv motor, DJI 9450 pervane, 30A Simonk ESC
- Kumanda Alıcı ve Verici
- Radiolink AT-10
- Extra Ekipman
- GPS