- Katılım
- 14 Ağu 2017
- Mesajlar
- 946
- Tepkime puanı
- 1,940
- Yaş
- 33
- İlgi Alanı
- Multikopter
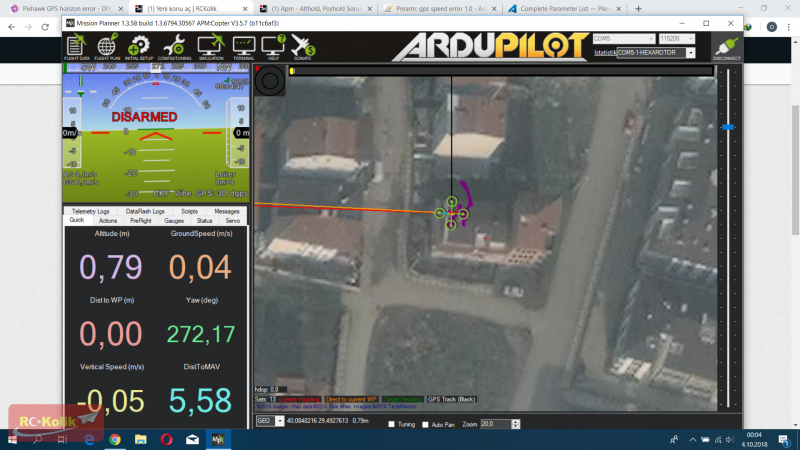
Herkese merhaba bir süredir uğraşıp bir türlü başarılı olamadığım bir konuda destek istiyorum. Öncelikle pixhawk uçuş kartı ve telemetrisine bağlı tcp üzerinden çalışan wifi modülü ile birlikte android son güncel sürümü ve beta sürümü ayrı ayrı denediğim tower uygulamasını kullanıyorum. Amacım wifi üzerinden follow me modunu kullanabilmek, diğer tüm guided mod özellikleri sorunsuz çalışıyor ancak follow me moduna aldığımda düğme turuncu olarak kalıyor multikopter takibe başlamıyor ancak yükseklik komutlarını da harfiyen uyguluyor. Benim yaptığım araştırma sonucunda tower uygulaması eğer gps keskinliği 10 metrenin altında ise konumu multiye göndermiyor diye bir yazı okudum bununla ilgili telefonumda iki farklı uygulama yaptım ilki gps accuracy değerini ölçen bir program ile bu değeri kontrol ettim ve 3-4 metre civarında olduğunu gördüm sonrasında bir ihtimal wifi bağlantısı olup mobil bağlantı olmadığı için olabilir mi diye düşünerek hem mobil hemde wifi sistemlerini eş zamanlı çalıştırmanın yolunu bularak bunu da uyguladım sorun aynı şekilde devam ediyor. Follow me butonuna basınca turuncu renkte yanmaya devam ediyor. (Maviye dönmesi gerekirken) Tower uygulamasından mavlink üzerinden giden gelen verileri değerlendirdiğimde ise anladığım kadarıyla konum yani gps bilgileri telefondan pixhawka aktarılıyor. Bu konuda aklıma başka bir fikir gelmedi doğrusu, fikirlerinizi paylaşabilirseniz sevinirim. @Şakir Polay bey eğer mavlink aktarım verilerini okumak konusunda bilginiz varsa tower uygulamasının vehicle history altında ki kayıtlarını paylaşsam bir inceleme şansınız olur mu? Herkese fikirleri için şimdiden teşekkürler ")