Herkese Merhaba!
Arkadaşlar Holybro Pixhawk 4 FMU5 ile Hexacopter yaptım. Biraz büyük boy. Ancak Gps li moda aldığımda takla atma eğiliminde. Log kayıtlarından sorunun Pusulada olduğunu anladım.
Pixhawk ın yerleşik pusulasında doğru yönü gösteriyor. Harici GPS+Pusula modülünü taktığımda, yine doru yönü gösteriyor. Ancak öncelikli veriyi Yerleşik Pusuladan alıyor.
Alette yüksek akım geçtiği için, (6215 340KV 6 adet motor) ben sadece harici pusulayı aktif etmek istiyorum. Sadece harici pusulayı aktif ettiğimde ise, Kötü pusula verileri diyor, ve tam tersi yönü gösteriyor. Rotation= yaw 180 olarak ayarlasam da, değişen bir şey olmuyor
Başka Pixhawk GPS+pusula modülünü taktım, aynı sorun devam ediyor. Pixhawk4 mini var, anı problem onda da var.
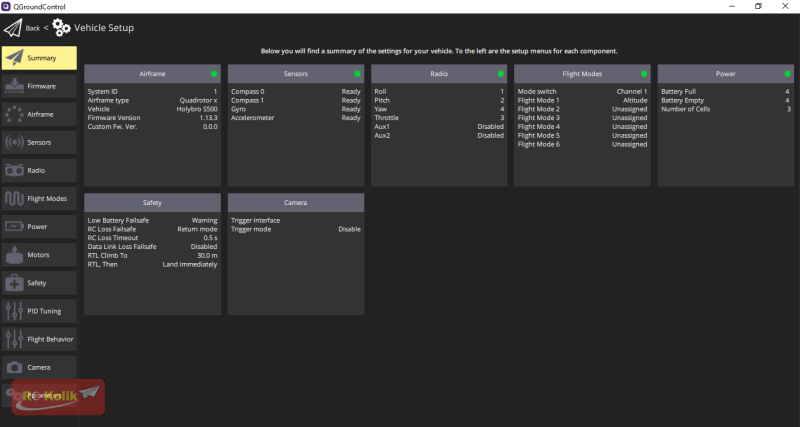
Sanırım atladığım temel bir ayar var. (İki Pixhawk ta da donanımsal problem yoksa) Resimlerde durum tam olarak anlaşılıyor. Şimdiden teşekkür ederim.
Arkadaşlar Holybro Pixhawk 4 FMU5 ile Hexacopter yaptım. Biraz büyük boy. Ancak Gps li moda aldığımda takla atma eğiliminde. Log kayıtlarından sorunun Pusulada olduğunu anladım.
Pixhawk ın yerleşik pusulasında doğru yönü gösteriyor. Harici GPS+Pusula modülünü taktığımda, yine doru yönü gösteriyor. Ancak öncelikli veriyi Yerleşik Pusuladan alıyor.
Alette yüksek akım geçtiği için, (6215 340KV 6 adet motor) ben sadece harici pusulayı aktif etmek istiyorum. Sadece harici pusulayı aktif ettiğimde ise, Kötü pusula verileri diyor, ve tam tersi yönü gösteriyor. Rotation= yaw 180 olarak ayarlasam da, değişen bir şey olmuyor
Başka Pixhawk GPS+pusula modülünü taktım, aynı sorun devam ediyor. Pixhawk4 mini var, anı problem onda da var.
Sanırım atladığım temel bir ayar var. (İki Pixhawk ta da donanımsal problem yoksa) Resimlerde durum tam olarak anlaşılıyor. Şimdiden teşekkür ederim.
Bu RESMİ görmek için izniniz yok. Giriş yap veya üye ol
Bu RESMİ görmek için izniniz yok. Giriş yap veya üye ol
Bu RESMİ görmek için izniniz yok. Giriş yap veya üye ol
Bu RESMİ görmek için izniniz yok. Giriş yap veya üye ol
Son düzenleme: