Arkadaşlar ben başka bir uçağa ait ölçü plan vs kullanmadan çift motorlu bir uçak yaptım. Hem Fpv yapma, hem de uçağı eşim Yada çocuğumun elle atıyor olması ve pervanenin zarar vermemesini istememden dolayı böyle bir uçak ortaya çıktı.
Uçağa apm 2.6 taktım. Ayarlarını uygun olarak yaptım. Otopilotun titreşim engelleme lastiklerini de taktım. Gps i ve Otopilotu video vericiden 40 cm kadar uzağa yerleştirdim. Video vericim 500 mw 1.2 ghz.
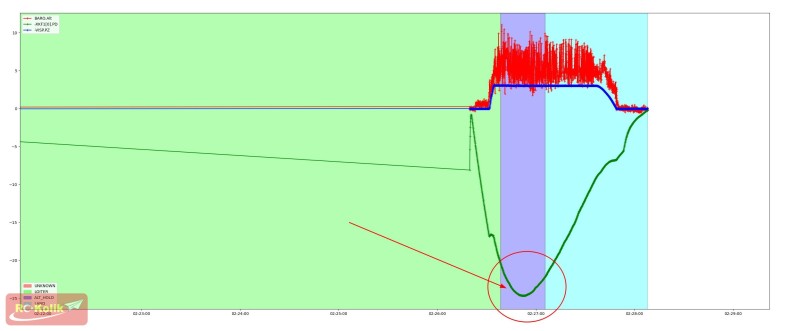
Uçak stab ve fbwa modda her zaman sağlıklı uçuyor. Fakat RTL'de bazen yere yöneliyor. Yani bazen yere 3,4 metre mesafede stab Yada Manuel'e geçerek uçağı kurtarıyorum. Bunu mesela 1 pil uçarken yapmıyor. Diğer pille ikinci uçuşta yapabiliyor. Genelde aynı yerde ikinci pile geçince başıma bu geliyor.
Bu sıkıntı Yüzünden uzağa gidemiyorum. Yani video sinyali kaybolsa. Kumanda failsafe olsa uçak nasıl olsa eve döner diyemeyince bir kaç km ile sınırlı kalıyorum. Apm den iyi anlayan biri cevaplarsa sevinirim. Teşekkürler.
Sent from my iPad using Tapatalk
Uçağa apm 2.6 taktım. Ayarlarını uygun olarak yaptım. Otopilotun titreşim engelleme lastiklerini de taktım. Gps i ve Otopilotu video vericiden 40 cm kadar uzağa yerleştirdim. Video vericim 500 mw 1.2 ghz.
Bu RESMİ görmek için izniniz yok. Giriş yap veya üye ol
Uçak stab ve fbwa modda her zaman sağlıklı uçuyor. Fakat RTL'de bazen yere yöneliyor. Yani bazen yere 3,4 metre mesafede stab Yada Manuel'e geçerek uçağı kurtarıyorum. Bunu mesela 1 pil uçarken yapmıyor. Diğer pille ikinci uçuşta yapabiliyor. Genelde aynı yerde ikinci pile geçince başıma bu geliyor.
Bu sıkıntı Yüzünden uzağa gidemiyorum. Yani video sinyali kaybolsa. Kumanda failsafe olsa uçak nasıl olsa eve döner diyemeyince bir kaç km ile sınırlı kalıyorum. Apm den iyi anlayan biri cevaplarsa sevinirim. Teşekkürler.
Sent from my iPad using Tapatalk
") sorunun çözülmesine sevindik, gözünüz aydin diyelim
sorunun çözülmesine sevindik, gözünüz aydin diyelim