- Katılım
- 17 Eyl 2013
- Mesajlar
- 8,790
- Tepkime puanı
- 23,176
- Yaş
- 61
- Konum
- İstanbul
- Web sitesi
- www.sumeryamaner.com
- İlgi Alanı
- Uçak
C130 için son projemiz olan devir izleme sistemi ne yazık ki optik okuma ile ilgili sorunlara takıldı ve ilerleyemedi.Yazılımsal olarak sorun olmamasına rağmen devir okumaya henüz çözüm üretemedim.
Ama şimdi yeni bir sorun ve çözüm projesi ile karşınızdayım.
Hezarfen pisti yaklaşık 120 metre ve oldukça düzgün bir zemine sahip. Bu C130 ise oldukça hızlı son yaklaşma yapması gereken bir uçak. Az rüzgarlı havalarda pistin neredeyse tamamını kullanmak gerekiyor inişte. Yani ne lazım? Fren!
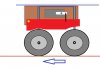
Uçağın ana dikmeleri her iki yanda çift. Ana tekerlekler her iki yanda ikişer tane arka arkaya konumlanmış olarak bulunuyorlar. Sağlam aluminyum plakalarak vidalanmış yaklaşık U şeklindeki 5 mm tel içeriyorlar. Piyasada farklı fren çözümleri var. Havalı olanları ben istemiyorum. Ekstra ağırlık getirecekler. Ayrıca var olan iniş takımı tellerine adaptasyonları güç. Mekanik sistemler var ama onları getirtmek hem para hem zaman istiyor. Elektriklilerin çifti yaklaşık 100 dolardan başlıyor. Aksa adapte edilmeleri de ayrı bir sorun.
O halde çözüm üretilmeli.
Çizimleri yarın gönderebileceğim (hastanedeki bilgisayarda kaldılar). Ama kabaca tekerleklerin üst kontürü şeklinde kesilmiş kalın bir ahşap parçasının tekerlere üstten bastırması esasına dayanıyor sistem (ahşabın tekerleklere sürtüneceği yüzeye plastik ya da aluminyum kaplamayı da düşünüyorum). İki tarafta birer servo kontrol edecek. Gerekli mekanik sistemi netleştirdim ve hafta sonu uygulayacağım.
Geriye başka bir sorun kalıyor. Kumandada kanal kalmadı! İki seçeneğim var. Birisi flapları servo reverser kullanarak çalıştırmak ve bir kanalı boşa çıkarmak. Ya da uygun bir mikrokontrolörlü devre yapmak. Tabii ki ikincisini tercih ediyorum.
Tasarladığım modül sağ ve sol olmak üzere iki servoyu kontrol ediyor. Alıcının elevatör kanalından Y kablo ile giriş alıyor. Üzerinde dört adet trim ayarı var. Bunlar her iki tarafta frenlerin OFF ve FULL oldukları konumları ayarlamak için. Özellikle lastikler aşındıkça ufak ayarlar yapılabilir. Ya da frenaj sırasında bir tarafa çekme varsa buradan düzeltilebilir.
Modül elevatör sinyalini takip ediyor. Elevatör çubuğu sıfır konumundan yaklaşık 10 - 15 derece ileri itildiğinde fren devreye giriyor ve proporsiyonel çalışıyor. Yani ne kadar fazla itersen o kadar fazla bastırıyor tekerleklere. Buraya kadar olanı boş kanal olsa miks ve offset ile de yapılır zaten. Ama burada bir başka numaramız var. Elevatör stiğini belirli bir açıdan fazla itince (örneğin 30 derece) sistem ABS moduna giriyor. Yani tekerleklere çok fazla baskı uyguluyor ama bunu saniyede 10 kere gibi bastırıp bırakarak gerçekleştiriyor.
Kodu yazdım. Hafta sonu mekanik sistemin prototipini tamamlayabilirsem denemesini de yapacağım. Fotoğraf ve video da koyarım elbette.
İndikten sonra gerçekçi bir şekilde yavaşlayan bir C130 oldukça şık görünecektir...")
Ama şimdi yeni bir sorun ve çözüm projesi ile karşınızdayım.
Hezarfen pisti yaklaşık 120 metre ve oldukça düzgün bir zemine sahip. Bu C130 ise oldukça hızlı son yaklaşma yapması gereken bir uçak. Az rüzgarlı havalarda pistin neredeyse tamamını kullanmak gerekiyor inişte. Yani ne lazım? Fren!
Uçağın ana dikmeleri her iki yanda çift. Ana tekerlekler her iki yanda ikişer tane arka arkaya konumlanmış olarak bulunuyorlar. Sağlam aluminyum plakalarak vidalanmış yaklaşık U şeklindeki 5 mm tel içeriyorlar. Piyasada farklı fren çözümleri var. Havalı olanları ben istemiyorum. Ekstra ağırlık getirecekler. Ayrıca var olan iniş takımı tellerine adaptasyonları güç. Mekanik sistemler var ama onları getirtmek hem para hem zaman istiyor. Elektriklilerin çifti yaklaşık 100 dolardan başlıyor. Aksa adapte edilmeleri de ayrı bir sorun.
O halde çözüm üretilmeli.
Çizimleri yarın gönderebileceğim (hastanedeki bilgisayarda kaldılar). Ama kabaca tekerleklerin üst kontürü şeklinde kesilmiş kalın bir ahşap parçasının tekerlere üstten bastırması esasına dayanıyor sistem (ahşabın tekerleklere sürtüneceği yüzeye plastik ya da aluminyum kaplamayı da düşünüyorum). İki tarafta birer servo kontrol edecek. Gerekli mekanik sistemi netleştirdim ve hafta sonu uygulayacağım.
Geriye başka bir sorun kalıyor. Kumandada kanal kalmadı! İki seçeneğim var. Birisi flapları servo reverser kullanarak çalıştırmak ve bir kanalı boşa çıkarmak. Ya da uygun bir mikrokontrolörlü devre yapmak. Tabii ki ikincisini tercih ediyorum.
Tasarladığım modül sağ ve sol olmak üzere iki servoyu kontrol ediyor. Alıcının elevatör kanalından Y kablo ile giriş alıyor. Üzerinde dört adet trim ayarı var. Bunlar her iki tarafta frenlerin OFF ve FULL oldukları konumları ayarlamak için. Özellikle lastikler aşındıkça ufak ayarlar yapılabilir. Ya da frenaj sırasında bir tarafa çekme varsa buradan düzeltilebilir.
Modül elevatör sinyalini takip ediyor. Elevatör çubuğu sıfır konumundan yaklaşık 10 - 15 derece ileri itildiğinde fren devreye giriyor ve proporsiyonel çalışıyor. Yani ne kadar fazla itersen o kadar fazla bastırıyor tekerleklere. Buraya kadar olanı boş kanal olsa miks ve offset ile de yapılır zaten. Ama burada bir başka numaramız var. Elevatör stiğini belirli bir açıdan fazla itince (örneğin 30 derece) sistem ABS moduna giriyor. Yani tekerleklere çok fazla baskı uyguluyor ama bunu saniyede 10 kere gibi bastırıp bırakarak gerçekleştiriyor.
Kodu yazdım. Hafta sonu mekanik sistemin prototipini tamamlayabilirsem denemesini de yapacağım. Fotoğraf ve video da koyarım elbette.
İndikten sonra gerçekçi bir şekilde yavaşlayan bir C130 oldukça şık görünecektir...











![[DIY]: 1 Saat - LiPo Powerbank](https://resim.rckolik.gen.tr/album/2017/10/12/r_img1320_59df69c4f36c3.jpg)
![[DIY]: 1 Saat - Atölye Işığı](https://resim.rckolik.gen.tr/album/2017/09/23/r_img1251_59c690797c244.jpg)
![[DIY]: Sıcaklar Yüzünden Soğumayan Motorlar : Motor Soğutucusu](https://resim.rckolik.gen.tr/album/2017/09/22/r_whatsapp-image-2017-09-22-at-1324_59c4e6ce1b115.jpeg)
![[DIY]: CNC Kanat Kesici](/forum/proxy.php?image=http%3A%2F%2Fi68.tinypic.com%2F2zsu494.png&hash=3c62705a48199b0ed702f975e8110fef)
