Arkadaşlar, öncelikle bu sıralama ve her bir adımdaki değerler kişiden kişiye değişebilir. Kurcalayarak optimum setup bulunacaktır. Fakat aşağıda paylaştığımız değerler başlangıç için iyi bir fikir verecektir.
Bu ayarları en çok uçmayı planladığınız kafa turu için yapınız.
En iyi başlangıç koşulları şöyledir;
** Paller ayar (kilitli) pozisyonunda 0° dir. (bunu palleri katlama metodu ile rahatça görebilirsiniz.)
** Hover collective noktasında cyclic ring en iyi değerine ayarlanır.
** Kuyruk sliderın uç noktaları, faydalı aralıkta ayarlanır. (
** Paddle sim ve pitch pump sıfırlanır. (Paddle sim; arttırıldığında flybarlı heli hissiyatı veren parametre... Pitch Pump; hızlı collective komutlarına dinamik ekleme yapan parametre -böylece tictoc gibi hareketleri daha net gösterir-)
** Style 70-100 arası ayarlanır.
** Hedeflenen rpm için uygun dişli/pinyon, uygun kv li motor, uygun hücreli lipo seçilir.
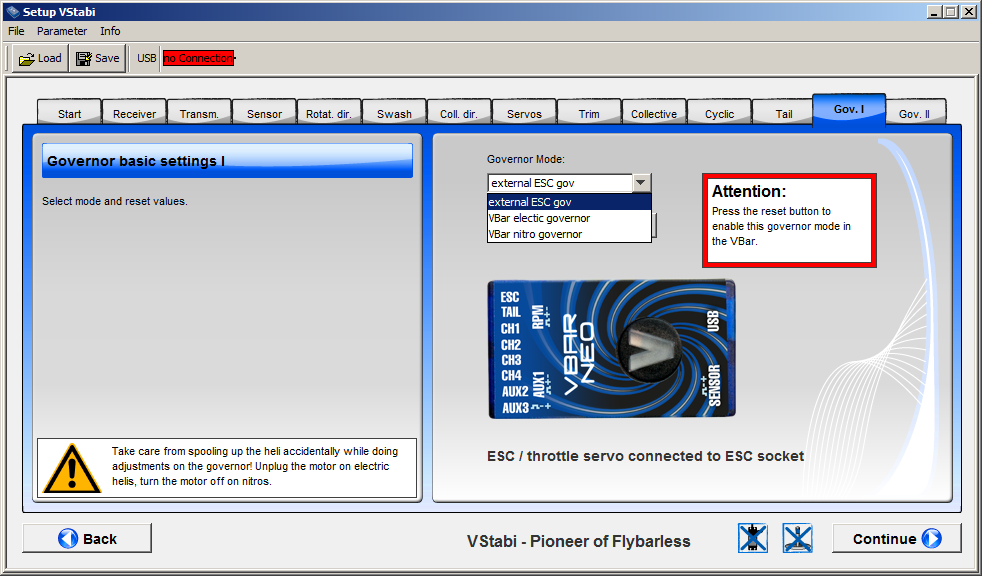
Adım-1: Temel Governor Ayarları
** Gov gain = 0(sıfır)
** Gov I = 0(sıfır)
** 0° açıda spoolup yapılır.
** İstenen kafaturuna ulaşılmadığı sürece basic throttle değeri ile oynanır. (basic throttle)
** Hover pozisyonuna kalkılır, hoverda istenen kafaturu korunmadığı sürece collective eklenir. (collective add)
** Orta hızlı bir tırmanış gerçekleştirilir, kafaturu kontrol edilir, gerekirse biraz daha collective eklenir. (collective add)
** Eklenen collective'in 1/3 ü kadar cyclic eklenir. (cyclic add)
** Governor gain ve Integral'a dönülür.
Adım-2: Governor ile Temel Kuyruk Ayarı
** Tail gain düşürülür (örneğin; 40)
** Hoverda tutulur ve orta hızlı tırmanışlar gerçekleştirilir.
** Ana palleri saat yönünde dönen bir heli için; tırmanışlarda burun sola dönüyorsa, kuyruk için collective torque precompensation arttırılır.
** Eğer olduğu yerde kalıyorsa, optimum nokta bulunmuştur.
** Precompensation 60 gibi bir değere arttırıldığında hala burun dönüyorsa; governor'un collective add kısmı düşürülür. (çok sert governor ile kuyruk aşırı yüklenmiştir)
** Collective precomp'un 1/3 ü kadar cyclic precomp girilir.
Adım-3: Tail Gain
** Kuyruğu tutacak kadar arttırılır. (Vbar'lar titreşimleri engellemek için uçuş durumuna göre (örneğin; hızlı uçuşlar) hesaplanan internal gain özelliğine sahiptir.)
** Eğer kuyruk güzel tutunuyorsa, daha fazla gain eklemeye gerek yoktur.
Adım-4: Elevator Precompensation
** Mainrotor gain 30-40 gibi bir değere düşürülür. (tavsiye edilen gainin yaklaşık 1/2 sine kadar)
** Hover pozisyonundan bir tırmanış gerçekleştirilir.
** Kuyruk borusu izlenir. Eğer önce aşağı doğru sarkıyorsa, elevator precomp değeri arttırılır.
(Not: Bundan sonra aşağıdaki adımlar farklı sırada da gerçekleştirilebilir.)
Adım-5a: Trim Flight
** Tail torque precomp değerini değiştirmek, kuyruk "merkezi"ni değiştirdiği için, yukarıdaki adımlardan sonra trim uçuşu yapmak optimum bir ayar için faydalıdır.
** Durgun bir günde (rüzgarsız), trim uçuşu gerçekleştirilir. (vbar autotrim fonksiyonu)
** Kalkılır, hoverda dururken eller birkaç saniyeliğine çekilir. Gerekiyorsa dengeleyici komutlar verilir.
** Pirouette ler (kuyruk dönüşleri) olduğu yerde kalıyor, heli deplase olmuyorsa, trim uçuşu sonlandırılır.
Adım-5b: Swash Optimizer
** Hedeflenen "agility" değeri girilir. Bu cyclic optimizer'ları resetler. Optimizerı "on" konumuna getirilir.
** Dört yönde de sabit hızlı flipler ve rollar gerçekleştirilir. Stick maksimum mesafesinin 50-70% aralığında bir sağ stick komutu ile...
** Örneğin her yönde 5-10 adet gerçekleştirildiğinde, stabil dönüşler veriyorsa, optimizer "off" konumuna getirilir.
Adım-5c: Tail Optimizer
** Optimizer açılır. Her iki yönde pirouette ler gerçekleştirilir.
** Aynı zamanda her yönde örneğin 5 er kere "stop" lar gerçekleştirilir.
** Optimizer kapatılır.
** Kuyruk stopları bir yönde daha yumuşak oluyorsa (fiziksel durumdan dolayı); stop gain arttırılır, işe yarıyor mu bakılır.
** İşe yaramamışsa; tail acceleration düşürülür, daha yumuşak ama her iki yönde eşit tepki verir. (Opsiyonel olarak 45 veya altına düşürülebilir. Scale helilerin zayıf kuyruklarında genellikle 30 olarak kullanılır.)
Adım-5d: Main Gain
** Değişiklik hissetmeyene kadar arttırılır.
** Kritik değildir. Normal bir heli için 80 değerinde tutulabilir.
Adım-5e: Diğer Yapılacaklar
** Tercih edilen Style girilir. (Düşük= daha oynak ; Yüksek= daha keskin)
** Tercih edilen Paddle sim girilir.
** Aynı şekilde Pitch pump da girilir. (Ama bunu kullanırsanız, kuyruk limitleri görebilir)
Önemli not-1: Bu ayarların çoğu her bir "bank" için ayrı ayrı ayarlanabilir.
Önemli not-2: Ayarları görsel olarak göstermek için Vbar Control ekranları kullanılmıştır. Fakat aynı parametreler bilgisayar (Vstabi Neo) arayüzünde de mevcuttur.
Bu RESMİ görmek için izniniz yok. Giriş yap veya üye ol
Bu ayarları en çok uçmayı planladığınız kafa turu için yapınız.
En iyi başlangıç koşulları şöyledir;
** Paller ayar (kilitli) pozisyonunda 0° dir. (bunu palleri katlama metodu ile rahatça görebilirsiniz.)
** Hover collective noktasında cyclic ring en iyi değerine ayarlanır.
** Kuyruk sliderın uç noktaları, faydalı aralıkta ayarlanır. (
Bu LİNKİ görmek için izniniz yok. Giriş yap veya üye ol
)** Paddle sim ve pitch pump sıfırlanır. (Paddle sim; arttırıldığında flybarlı heli hissiyatı veren parametre... Pitch Pump; hızlı collective komutlarına dinamik ekleme yapan parametre -böylece tictoc gibi hareketleri daha net gösterir-)
** Style 70-100 arası ayarlanır.
** Hedeflenen rpm için uygun dişli/pinyon, uygun kv li motor, uygun hücreli lipo seçilir.
Adım-1: Temel Governor Ayarları
** Gov gain = 0(sıfır)
** Gov I = 0(sıfır)
** 0° açıda spoolup yapılır.
** İstenen kafaturuna ulaşılmadığı sürece basic throttle değeri ile oynanır. (basic throttle)
** Hover pozisyonuna kalkılır, hoverda istenen kafaturu korunmadığı sürece collective eklenir. (collective add)
** Orta hızlı bir tırmanış gerçekleştirilir, kafaturu kontrol edilir, gerekirse biraz daha collective eklenir. (collective add)
** Eklenen collective'in 1/3 ü kadar cyclic eklenir. (cyclic add)
** Governor gain ve Integral'a dönülür.
Bu RESMİ görmek için izniniz yok. Giriş yap veya üye ol
Adım-2: Governor ile Temel Kuyruk Ayarı
** Tail gain düşürülür (örneğin; 40)
** Hoverda tutulur ve orta hızlı tırmanışlar gerçekleştirilir.
** Ana palleri saat yönünde dönen bir heli için; tırmanışlarda burun sola dönüyorsa, kuyruk için collective torque precompensation arttırılır.
** Eğer olduğu yerde kalıyorsa, optimum nokta bulunmuştur.
** Precompensation 60 gibi bir değere arttırıldığında hala burun dönüyorsa; governor'un collective add kısmı düşürülür. (çok sert governor ile kuyruk aşırı yüklenmiştir)
** Collective precomp'un 1/3 ü kadar cyclic precomp girilir.
Bu RESMİ görmek için izniniz yok. Giriş yap veya üye ol
Adım-3: Tail Gain
** Kuyruğu tutacak kadar arttırılır. (Vbar'lar titreşimleri engellemek için uçuş durumuna göre (örneğin; hızlı uçuşlar) hesaplanan internal gain özelliğine sahiptir.)
** Eğer kuyruk güzel tutunuyorsa, daha fazla gain eklemeye gerek yoktur.
Adım-4: Elevator Precompensation
** Mainrotor gain 30-40 gibi bir değere düşürülür. (tavsiye edilen gainin yaklaşık 1/2 sine kadar)
** Hover pozisyonundan bir tırmanış gerçekleştirilir.
** Kuyruk borusu izlenir. Eğer önce aşağı doğru sarkıyorsa, elevator precomp değeri arttırılır.
Bu RESMİ görmek için izniniz yok. Giriş yap veya üye ol
(Not: Bundan sonra aşağıdaki adımlar farklı sırada da gerçekleştirilebilir.)
Adım-5a: Trim Flight
** Tail torque precomp değerini değiştirmek, kuyruk "merkezi"ni değiştirdiği için, yukarıdaki adımlardan sonra trim uçuşu yapmak optimum bir ayar için faydalıdır.
** Durgun bir günde (rüzgarsız), trim uçuşu gerçekleştirilir. (vbar autotrim fonksiyonu)
** Kalkılır, hoverda dururken eller birkaç saniyeliğine çekilir. Gerekiyorsa dengeleyici komutlar verilir.
** Pirouette ler (kuyruk dönüşleri) olduğu yerde kalıyor, heli deplase olmuyorsa, trim uçuşu sonlandırılır.
Bu LİNKİ görmek için izniniz yok. Giriş yap veya üye ol
Bu RESMİ görmek için izniniz yok. Giriş yap veya üye ol
Adım-5b: Swash Optimizer
** Hedeflenen "agility" değeri girilir. Bu cyclic optimizer'ları resetler. Optimizerı "on" konumuna getirilir.
** Dört yönde de sabit hızlı flipler ve rollar gerçekleştirilir. Stick maksimum mesafesinin 50-70% aralığında bir sağ stick komutu ile...
** Örneğin her yönde 5-10 adet gerçekleştirildiğinde, stabil dönüşler veriyorsa, optimizer "off" konumuna getirilir.
Bu RESMİ görmek için izniniz yok. Giriş yap veya üye ol
Adım-5c: Tail Optimizer
** Optimizer açılır. Her iki yönde pirouette ler gerçekleştirilir.
** Aynı zamanda her yönde örneğin 5 er kere "stop" lar gerçekleştirilir.
** Optimizer kapatılır.
** Kuyruk stopları bir yönde daha yumuşak oluyorsa (fiziksel durumdan dolayı); stop gain arttırılır, işe yarıyor mu bakılır.
** İşe yaramamışsa; tail acceleration düşürülür, daha yumuşak ama her iki yönde eşit tepki verir. (Opsiyonel olarak 45 veya altına düşürülebilir. Scale helilerin zayıf kuyruklarında genellikle 30 olarak kullanılır.)
Bu RESMİ görmek için izniniz yok. Giriş yap veya üye ol
Bu RESMİ görmek için izniniz yok. Giriş yap veya üye ol
Adım-5d: Main Gain
** Değişiklik hissetmeyene kadar arttırılır.
** Kritik değildir. Normal bir heli için 80 değerinde tutulabilir.
Bu RESMİ görmek için izniniz yok. Giriş yap veya üye ol
Adım-5e: Diğer Yapılacaklar
** Tercih edilen Style girilir. (Düşük= daha oynak ; Yüksek= daha keskin)
** Tercih edilen Paddle sim girilir.
** Aynı şekilde Pitch pump da girilir. (Ama bunu kullanırsanız, kuyruk limitleri görebilir)
Önemli not-1: Bu ayarların çoğu her bir "bank" için ayrı ayrı ayarlanabilir.
Önemli not-2: Ayarları görsel olarak göstermek için Vbar Control ekranları kullanılmıştır. Fakat aynı parametreler bilgisayar (Vstabi Neo) arayüzünde de mevcuttur.

 Gerçekten hiç üşenmeyip, emek verip tercüme ediyor ve konu açıyorsun
Gerçekten hiç üşenmeyip, emek verip tercüme ediyor ve konu açıyorsun