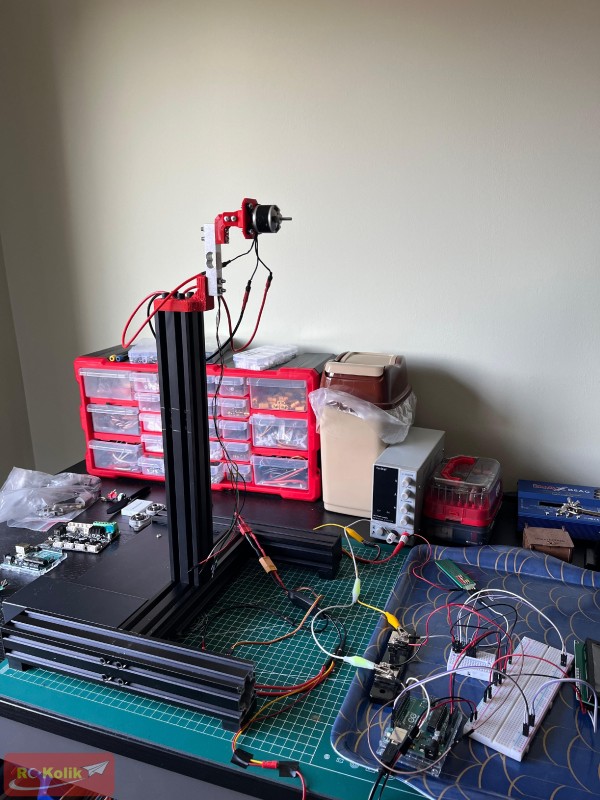
Bir cok amacla kullanilabilecek bir hall effect sensor uygulamasindan bahsetmek istiyorum. Sensorumuz hall effect sensor US1881 , sensore miknatis yaklastiginda devreyi aciyor bu sekilde donen cisim uzerine takilacak ufak bir miknatis ile devir saymak mumkun olabiliyor.
Modelcilikte kullanimi daha kisitli olabilir , pervane vs uzerine miknatis yerlestirmek balans sorunlarina neden olabileceginden genelde IR olan modelleri kullaniliyor.
Temel uygulama 5V ile Signal arasina 10k'lik bir direnc koyuyoruz. Signal pinini 2.digital pine bagliyoruz. Sensor 3.5-24V araliginda calisabiliyor. Biz arduino'nun 5v cikisina bagliyoruz.Devre oldukca basit.
Eger iki miknatis kullaniyorsak her sinyal yarim tur olacaktir.
seklinde yapiyoruz. Oldukca kisa ve basit bir uygulama.
Modelcilikte kullanimi daha kisitli olabilir , pervane vs uzerine miknatis yerlestirmek balans sorunlarina neden olabileceginden genelde IR olan modelleri kullaniliyor.
Temel uygulama 5V ile Signal arasina 10k'lik bir direnc koyuyoruz. Signal pinini 2.digital pine bagliyoruz. Sensor 3.5-24V araliginda calisabiliyor. Biz arduino'nun 5v cikisina bagliyoruz.Devre oldukca basit.
Eger iki miknatis kullaniyorsak her sinyal yarim tur olacaktir.
Kod:
volatile byte yarimtur;
unsigned int tur;
unsigned long zaman;
void setup()
{
Serial.begin(9600);
attachInterrupt(0, tursay, RISING);
yarimtur = 0;
tur = 0;
zaman = 0;
}
void loop()
{
if (yarimtur >= 20) {
tur = 30*1000/(millis() - zaman)*yarimtur;
zaman = millis();
yarimtur = 0;
Serial.print("Devir ="); Serial.println(tur,DEC);
}
}
void tursay()
{
yarimtur++;
}seklinde yapiyoruz. Oldukca kisa ve basit bir uygulama.
")