Merhabalar, sizlerle uzun zamandır kafamda kurguladığım itki test standı projesine başladığımı duyurmak için yazıyorum. Kabaca 300W güç ve altı elektrik motor, pervane, ESC ve batarya kombinasyonlarını test edecek bir sistem olacak. Eski Ender 3 v2 yazıcımın kasasını söküp işe koyulmaya başladım ") .
.
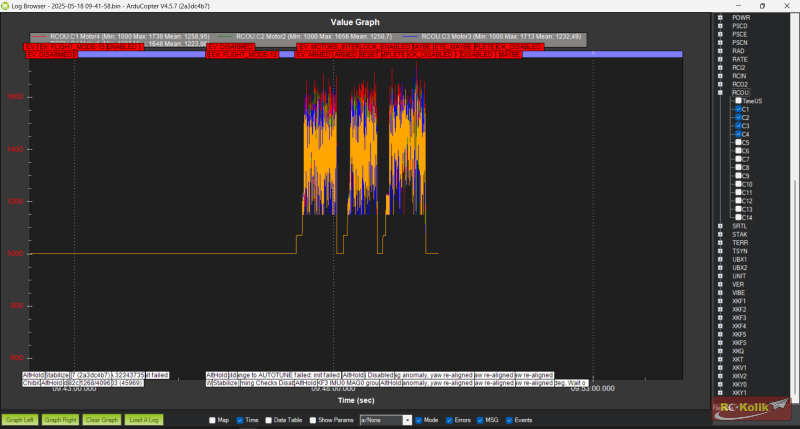
Şimdilik ölçümünü alacağım parametreler:
.Şimdilik ölçümünü alacağım parametreler:
- Voltaj
- Akım
- İtki
- Tork (bu zor olacak)
- RPM
- Titreşim
Bu RESMİ görmek için izniniz yok. Giriş yap veya üye ol