- Katılım
- 16 Ocak 2015
- Mesajlar
- 193
- Tepkime puanı
- 168
- Web sitesi
- www.elektroinceleme.com
- İlgi Alanı
- Uçak
Merhaba,
Son kırımım sonrası EKF konusunda edindiğim tecrübeleri sizlerle paylaşmak istiyorum.
Öncelikle kırımdan bahsedelim. Multikopter acemi birisi ile ufak bir düşüş yaşadı. Düşüş sonucu bir tane pal kırılmıştı ve ben de kırılan pali değiştirerek ve diğerlerini kontrol etmeyerek tekrardan uçurmaya devam ettim. Pervanelerin dandik olması ve muhtemelen düşüş sonrası aldığı hasar sonucu havada bir pervanenin tek bıçağı koptu ve multikopter çakılarak yere indi. Multikopterden fırlayan siyah bir parça gördüğümüz halde emin olmak için logları inceleyeyim dedim.
Logları incelediğimde şunu gördüm:
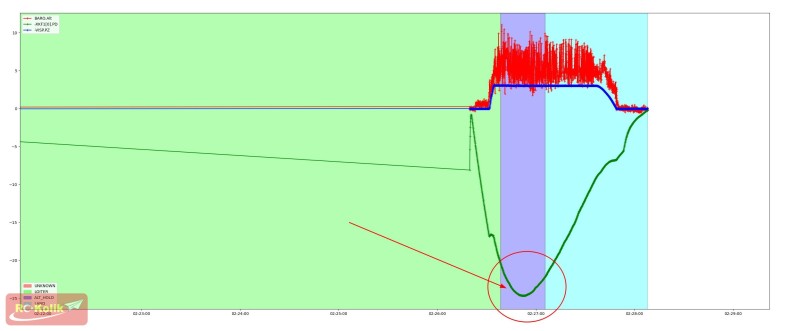
Bu hatayı ne zaman almış diye düşünürken düştüğündan 1-1,5sn sonra gazı kapattığımı hatırladım ve RC input grafiğine baktım:
Bu bulgularıma göre multikopter düştükten sonra EKF hatası almış. Düşmesinin sebebi EKF failsafe değilmiş.
Daha önceden EKF'nin ne işe yaradığını bilmeseydim ve zamanlamaya dikkat etmeseydim APM'ye duyduğum güven biraz daha azalacaktı.
Bu olayın üzerine APM'nin Wiki'sine girip EKF'nin ne olduğunu bir kere daha okuyunca taşlar tam olarak yerine oturdu.
Copter and Plane can use an Extended Kalman Filter (EKF) algorithm to estimate vehicle position, velocity and angular orientation based on rate gyroscopes, accelerometer, compass, GPS, airspeed and barometric pressure measurements.
Umarım çıkardığım varsayımda herhangi bir sıkıntı yoktur

Son kırımım sonrası EKF konusunda edindiğim tecrübeleri sizlerle paylaşmak istiyorum.
Öncelikle kırımdan bahsedelim. Multikopter acemi birisi ile ufak bir düşüş yaşadı. Düşüş sonucu bir tane pal kırılmıştı ve ben de kırılan pali değiştirerek ve diğerlerini kontrol etmeyerek tekrardan uçurmaya devam ettim. Pervanelerin dandik olması ve muhtemelen düşüş sonrası aldığı hasar sonucu havada bir pervanenin tek bıçağı koptu ve multikopter çakılarak yere indi. Multikopterden fırlayan siyah bir parça gördüğümüz halde emin olmak için logları inceleyeyim dedim.
Logları incelediğimde şunu gördüm:
Bu RESMİ görmek için izniniz yok. Giriş yap veya üye ol
Bu hatayı ne zaman almış diye düşünürken düştüğündan 1-1,5sn sonra gazı kapattığımı hatırladım ve RC input grafiğine baktım:
Bu RESMİ görmek için izniniz yok. Giriş yap veya üye ol
Bu bulgularıma göre multikopter düştükten sonra EKF hatası almış. Düşmesinin sebebi EKF failsafe değilmiş.
Daha önceden EKF'nin ne işe yaradığını bilmeseydim ve zamanlamaya dikkat etmeseydim APM'ye duyduğum güven biraz daha azalacaktı.
Bu olayın üzerine APM'nin Wiki'sine girip EKF'nin ne olduğunu bir kere daha okuyunca taşlar tam olarak yerine oturdu.
Copter and Plane can use an Extended Kalman Filter (EKF) algorithm to estimate vehicle position, velocity and angular orientation based on rate gyroscopes, accelerometer, compass, GPS, airspeed and barometric pressure measurements.
Bu LİNKİ görmek için izniniz yok. Giriş yap veya üye ol
Umarım çıkardığım varsayımda herhangi bir sıkıntı yoktur