Selamlar. 
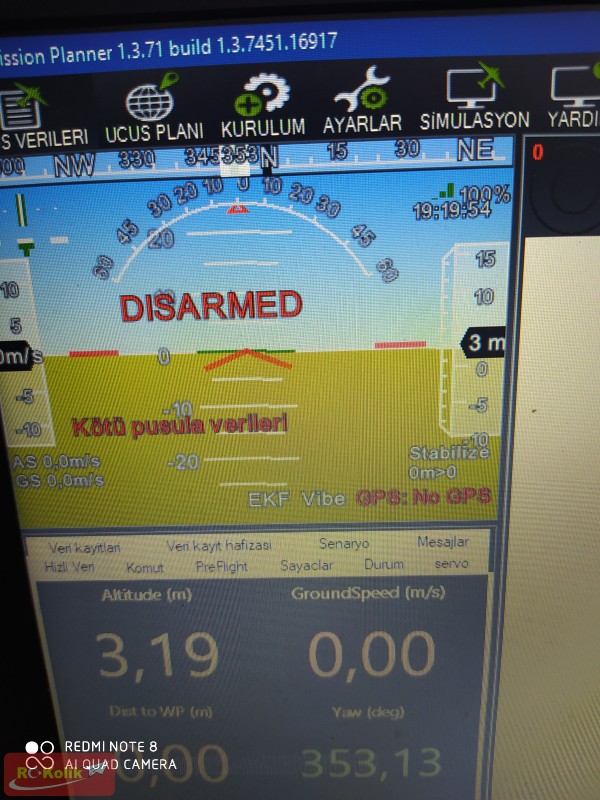
Yaşadığım sorunu kısaca anlatmam gerekirse Althold veya Poshold modlarında quadcopter sabit durması yerine belli bir yönde ilermeye çalışıyor. Forumda ve web'te araştırmalar yapsamda sorunu hala çözebilmiş değilim. Gps modülünde bir sıkıntı olabileceğini düşünüp bir tanıdığımdan başka bir GPS modülü alıp karta taktım. Kalibrasyonlarını yaptım fakat sorun aynı şekilde devam etti. ( Forward pozisyonunda sürükleniyor. ) Apm'nin titreşimden etkilendiğini düşünüp pervaneleri balanslasamda sonuç alamadım. Pusula kalibrasyonunu external ( harici ) olarak yapıyorum. Yardımcı olursanız sevinirim.
Saygılar")
APM 2.6
Tgy 9X
F450 frame
Yaşadığım sorunu kısaca anlatmam gerekirse Althold veya Poshold modlarında quadcopter sabit durması yerine belli bir yönde ilermeye çalışıyor. Forumda ve web'te araştırmalar yapsamda sorunu hala çözebilmiş değilim. Gps modülünde bir sıkıntı olabileceğini düşünüp bir tanıdığımdan başka bir GPS modülü alıp karta taktım. Kalibrasyonlarını yaptım fakat sorun aynı şekilde devam etti. ( Forward pozisyonunda sürükleniyor. ) Apm'nin titreşimden etkilendiğini düşünüp pervaneleri balanslasamda sonuç alamadım. Pusula kalibrasyonunu external ( harici ) olarak yapıyorum. Yardımcı olursanız sevinirim.
Saygılar
APM 2.6
Tgy 9X
F450 frame
- Kontrol Kartınız
- Apm 2.6
- Model Sınıfı
- f450 quadcopter
- Motor, Pervane ve ESC
- sunnsky 980 kv
- Kumanda Alıcı ve Verici
- turnigy 9x alıcı ve verici
- Extra Ekipman
- Gps module