Merhabalar
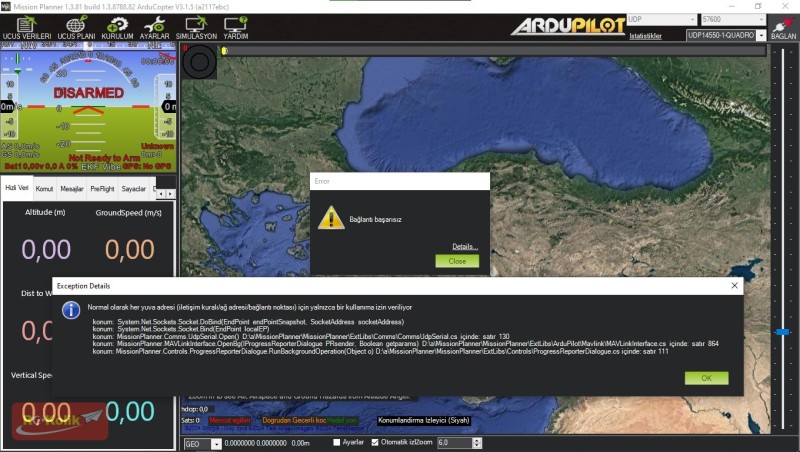
Frame 450 üzerine Arducopter 2.6 uçuş kontrol kartlı quadcopteri topladım. APM mission planner uygulamasında sorunsuz bir şekilde tüm kalibrasyonları yaptım. Fakat compass motor testte sürekli "prearm check FS_THR_VALUE" hatasını ve bazen "bad velocity" hatasını alıyorum. Bendeki FS THR VALUE değeri 1100 pwm, bu değeri değiştirmeme rağmen yine de aynı hatayı alıyorum ve sistemden çıkıp bataryayı takınca arm etmeme rağmen motorlar çalışmıyor ( çalışmamanın bu hatadan olduğunu düşünüyorum).
Ayrıca
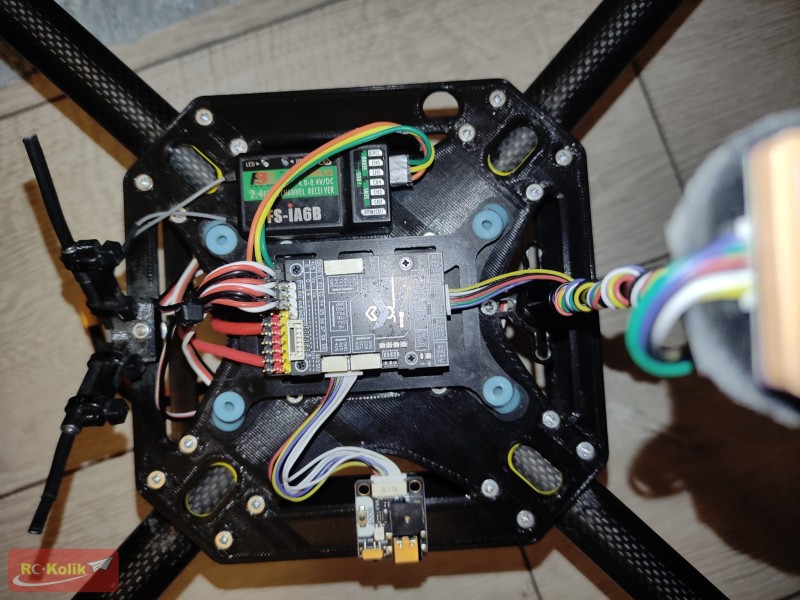
motor testte A-B-C-D sıralaması aşağıdaki gibi çıktı yönleri . motor numarası sıralamasının saat yönünde ya da tersi olması gerekmiyor mu ?
Frame 450 üzerine Arducopter 2.6 uçuş kontrol kartlı quadcopteri topladım. APM mission planner uygulamasında sorunsuz bir şekilde tüm kalibrasyonları yaptım. Fakat compass motor testte sürekli "prearm check FS_THR_VALUE" hatasını ve bazen "bad velocity" hatasını alıyorum. Bendeki FS THR VALUE değeri 1100 pwm, bu değeri değiştirmeme rağmen yine de aynı hatayı alıyorum ve sistemden çıkıp bataryayı takınca arm etmeme rağmen motorlar çalışmıyor ( çalışmamanın bu hatadan olduğunu düşünüyorum).
Ayrıca
Bu RESMİ görmek için izniniz yok. Giriş yap veya üye ol
motor testte A-B-C-D sıralaması aşağıdaki gibi çıktı yönleri . motor numarası sıralamasının saat yönünde ya da tersi olması gerekmiyor mu ?