Sevgili Necip
Öncelikle geçmiş olsun. Umarım multikopteriniz ciddi hasar almadan bu talihsizliği atlatmıştır.
İlgili log dosyasının incelemesinden
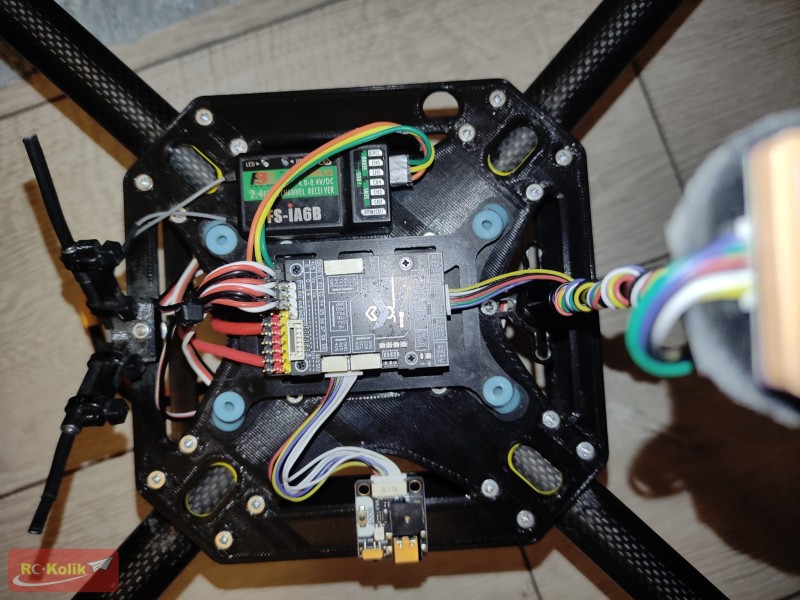
Multicopterinizin Quadcopter olduğunu (Xframe),
Arducopter 3.6.9 firmware yüklü olduğunu; (nisan 2019 ait eski bir firmware, bu versiyonda gyro notch filter özelliğini kullanamazsınız)
PID loop hızının 400hz e ayarlı olduğunu,
Esc fc iletişim protokolünün oneshot125 olduğunu,
Esc update hızının 490 olduğunu (loop ile senkronize edilmesi uçuş dinamiklerine olumlu teysiri olur)
Yüksekliğin yazılım tarafından kontrol edildiği uçuş modlarında saniyede 2.5 m maksimum yükselme veya alçalma yapabilecek şekilde ayar verildiğini,
Alçalma ve yükselme ile ilgili maksimum hızlara çıkış akselerayonunun oldukça konservatif bir ayarda olduğunu,
Gyro ve akselerometre ayarlarının default ayarlarda olduğunu,
Kullanılan pil konusunda net bir yorum yapılamasa da motorların itki lineerizayonu için maksimum ve minimum voltajların yanlış ayarlarda olduğunu
(MOT_BAT_VOLT_MAX: 168 MOT_BAT_VOLT_MIN:14 16.8 yerine 168 girilmiş olabilir mi?)
Quadcopterinizin %20 civarında thrust ile hover yapabildiğini, güçlü olduğunu,,
Throtle minimumda iken motorlara %15 lik bir itki verildiğini, Böylesi yüksek bir değerle cihazın kendini stabilize edebilecek minimum ve maksimum itki değerlerinin dar bir aralığa sıkışmasına sebep olduğunu,
Uçuş modlarının stabilize, althold, loiter, auto, poshold, rtl olarak şeçili olduğunu
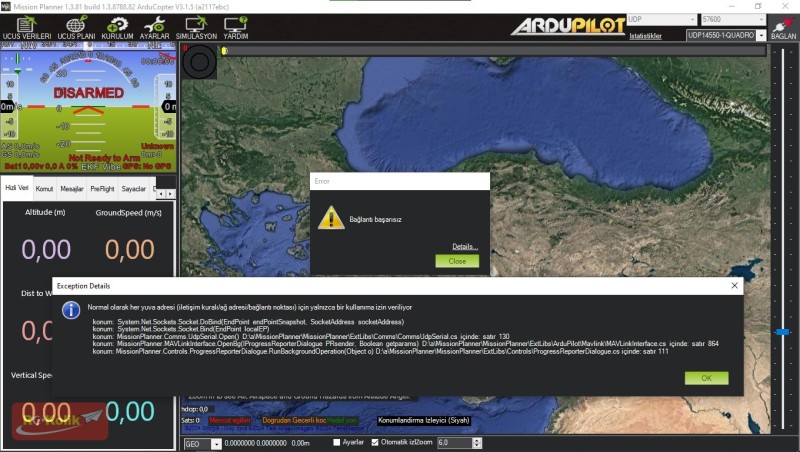
Yazılıma multicopterin güç kaynağının voltajını izleme ile ilgili kanımca güvensiz olan "izleme, takip etme" şeklinde ayar verilmiş olduğu böylece lipo kapasitesi azaldığında rtl yerine uçuşa devam edeceği . batery failsafe algoritmasının devrede olmadığını.
Log incelemesinde sistemi besleyen elektriksel kaynağın voltaj değerine ait herhangi bir veri olmadığı, buna göre uçuşun düşüş ile sonuçlanmasında bataryanın bitip bitmediğine yönelik bir durumun varlığı veya yokluğu hususunda yorum yapılamayacağını
Bu uçuşun uzaktan kumanda ile değil gcs ile guided mod da gerçekleştirildiğini
Uçuşun son aşamadında arm edilen yükseklikten daha alçakta bir düzleme inmesi ile ilgili komutun var olduğunu, bu yüzden yere düşme veya sert landing sebebinin bu olabileceğini,
Bu RESMİ görmek için izniniz yok. Giriş yap veya üye ol
Tam bu aşamada liponun içindeki son enerjiyi de verip vermediği hususunda bir değerlendirme yapabilmenin mümkün olmadığını
Gps glitch olayının yere düşme veya sert landing sonrasına ortaya çıktığını,
anlamaktayım
Bahis oluna hususlar ile ilgili en iyi ayarlamalar sonrasında quadcopterinizle harika ve kırımsız uçuşlar yapabileceğinize olan inancım tamdır.
İzah olunan hususlar hobi düzeyindeki naçizane bilgiler ile şekillenmiş olup gönül vermiş bir kardeşlerimin hertürlü katkı ve düzeltmesine de açıktır.
Sevgi ve saygılarımla
Şakir Polay