geçen haftalarda OSD programlama işinide tamamladım, oda çok zor olmayan bir işlem ama elimizde bazı malzemeler olması gerekiyor.
öncelikle banggood dan şu iki ürünü aldım osdyi bilgisayara bağlayabilmek için,
1 adet ftdi usb adaptör :
Bu LİNKİ görmek için izniniz yok. Giriş yap veya üye ol
1 adette bunu osdye bağlamak için kablo :
Bu LİNKİ görmek için izniniz yok. Giriş yap veya üye ol
tabi bu ftdi usb adaptör bizim cep telefonu data kabloları girişinden değilmiş, gelince gördüm, o nedenle elimdeki eski bir fotograf makinesinin data kablosunu kullandım bağlantı için, navigasyon data kablosuda olur.
şöyle bir bağlantı yapıyoruz,
Bu RESMİ görmek için izniniz yok. Giriş yap veya üye ol
internetten osd ile kablolamanın şu şekilde olması gerektiğini ögrendim.
GRN - DRT
TX - RX
RX - TX
+5V - VCC
GND - GND
BLK - CTS
ben windows 7 kurulu bir bilgisayarda denedim ve hiç dirver yüklemem gerekmedi direk cihazı tanıdı, diğer windows sürümlerinde denemedim.
ardından internetten osd programlamak için bir yazılım indiriyorz, minim osd extra diye aratınca çıkıyor, rcgroupdaki night_ghost isimli kişinin kullandığı son versiyon çok daha kapsamlı ama biraz daha karışık ben en son onu kullanarak programladım ama daha basit bir programlama için v 2.2 yeterli oluyor,
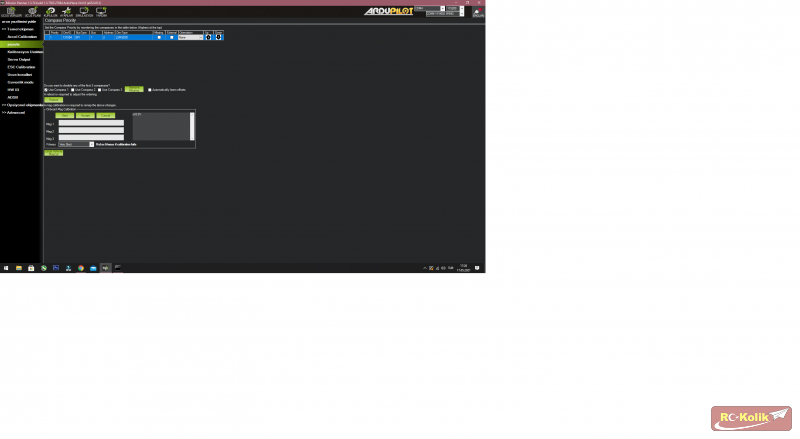
v 2.2 ekranı
Bu RESMİ görmek için izniniz yok. Giriş yap veya üye ol
alt kısımda doğru COM portu seçtikten sonra önce programın yanında gelen firmware ve char set güncellemelerini resimdeki gibi yapıyoruz.
Bu RESMİ görmek için izniniz yok. Giriş yap veya üye ol
Bu RESMİ görmek için izniniz yok. Giriş yap veya üye ol
ardından panel 1 ve panel 2 ekranlarında uçuş sırasında hangi bilgileri ekranımızda görmek istiyorsak tek tek işaretliyoruz, ve mouse ile ekranın istediğimiz yerine taşıyoruz, burda işlemlerimiz bitince her ekranda save current tab to OSD butonuna basarak osd mize kayıt yapıyoruz ve sonrada kullanıyoruz. dediğim gibi rcgroupdaki daha gelişmişi örneğin 4 panel var, panel sayısıda şu işe yarıyor, eğer uçuş modu switchimizi hılı bir şekilde oynatırsak diğer paneldeki görüntü ekranımıza geliyor, yani istediğimiz ekranları oluşturup uçuş sırasında da değiştirrebiliyoruz.
Bu RESMİ görmek için izniniz yok. Giriş yap veya üye ol
ekrana eklediğimiz özellikler ile ilgili olarak tek tek anlatan şu siteyede bakabilirsiniz :
Bu LİNKİ görmek için izniniz yok. Giriş yap veya üye ol