- Katılım
- 14 Ağu 2017
- Mesajlar
- 946
- Tepkime puanı
- 1,942
- Yaş
- 35
- İlgi Alanı
- Multikopter
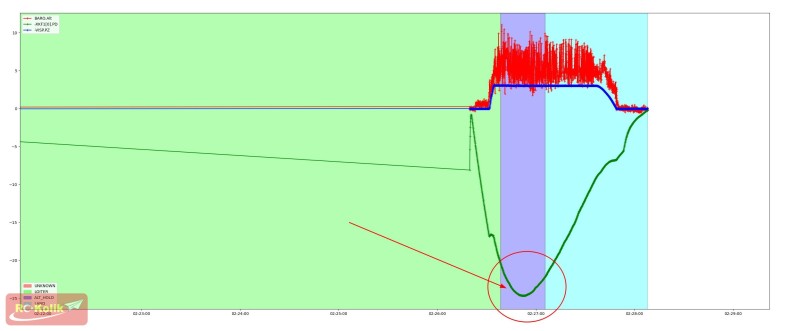
Herkese merhabalar ben aranıza yeni katıldım. Benim kendi imkânlarımla topladığım bir quadım var. Yeni yeni uçuş denemelerine başladım. Kısaca parçaları yazmak gerekirse s500 frame apm 2.8 ublox 7m gps + compass emax 2212 980kw motor ve emax 40 amper escler kumanda olarak radiolink at9s kullanıyorum. Soruna gelecek olursam stabilize alt hold modlarında uçuşta her şey yolunda gidiyor tüm sistemler normal çalışıyor gibi görünüyor ancak havada iken modu loiter a çevirdiğim zaman quad bir iki saniye askıda kalır gibi oluyor sonrada ön görülmeyen bir yöne doğru hızlanarak gitmeye başlıyor ve bu sırada kumanda girişlerinin hiç birine tepki vermiyor. Bu süreçte tekrar stabilize moda çekip dengeyi sağlayabiliyorum aksi halde o yönde bir şeye çarpana kadar ilerliyor. Yerden direk loiter modda kalkış yaptığım zamanda kalkıştan hemen sonra bir yöne doğru ilerlemeye başlıyor. Land modu kullanımında da benzer bir sorun oluyor. RTL modunu test edemedim. Uçuşlarla ilgili log dosyası veya görüntü paylaşabilirim. Önerilerinizi bekliyorum
") p
p