Şakir Polay
Çalışkan Uye
- Katılım
- 26 Haz 2016
- Mesajlar
- 377
- Tepkime puanı
- 1,176
- Yaş
- 57
- İlgi Alanı
- Multikopter
sevgili izzet,
ilgili tlog dosyasından elde olunan param dosyası ektedir. (upload a müsaade etmesi için uzantısını txt olarak değiştirdim)
ilgili dosyada WPNAV_LOIT_SPEED: 500 olarak kayıtlıdır.buna göre;
1 sn de 500cm hız sözkonusudur. 1 sn de 500cm gidiyorsa 3600sn (yani 1 saatte) 1800000cm ilerler. bunu 100000 e bölersek (1 km 1000m yani 100000cm dir) hız 18km/saat bulunmuş olur.
ilgili dosyada MOT_THST_HOVER: 0.1476935 olarak kayıtlıdır. buna göre;
cihaz %14.7 thrust da hover yapabilmetedir. aslında kabul edilen sınır 0.2-0.8 dir.
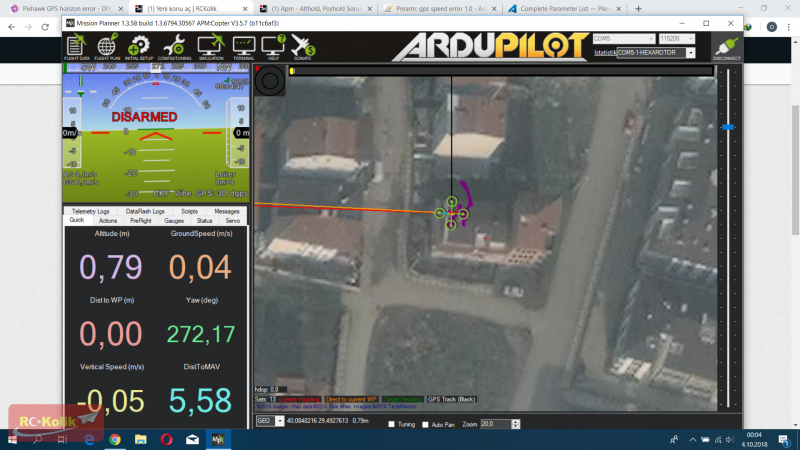
mission planner kendi bünyesinde tlog dosyasından cihazın uçuşu ile ilgili .param dosyasını extrakte edecek araçlarla gelmektedir.
ilgili dosyada FRAME_CLASS 2 olarak kayıtlıdır. kullandığınız frame hakikaten hexa dır. düzeltme için teşekkür ederim. bir şekilde dikkatimden kaçtı.
ilgili dosyada FS_BATT_VOLTAGE: 10.5 olarak kayıtlıdır. bu değer 3s lipo kullananlar için uygundur. bu değer ile battery failsafe çok geç devreye gireceğinden ciddi sorun yaşama ihtimali bulunuyor. en kısa zamanda bunu 14 olarak değiştirmeyi düşünmelisiniz.
ilgili dosyada FS_BATT_MAH: 0 olarak kayıtlıdır. akım sensörü yoksa bir diyeceğim yok ancak sisteme kayıtlı ve kalibre edilmiş akım sensörü varsa bu total lipo kapasitenin en az %20 si olarak yani 1600 olarak kayıt edilmesini düşünmelisiniz.
ilgili dosyada MOT_SPIN_ARM 0 olarak kayıtılıdır. arm olduğu zaman pervanelerin dönmesini görmek güvenlik için iyi bir seçenektir. bu bakımdan bu değerin 0.10 civarına ayarlanmasını düşünmelisiniz. arm olduğunda zaten dönüyor dediğinizi duyar gibiyim. nedeni RC3_MIN 1065 ayarlı olduğu içindir.
genel anlamda oldukça iyi konfigüre edilmiş bir cihaz bu yüzden tebriklerimi lütfen kabul buyurun.
sevgi ve saygılarımla
şakir polay
ilgili tlog dosyasından elde olunan param dosyası ektedir. (upload a müsaade etmesi için uzantısını txt olarak değiştirdim)
ilgili dosyada WPNAV_LOIT_SPEED: 500 olarak kayıtlıdır.buna göre;
1 sn de 500cm hız sözkonusudur. 1 sn de 500cm gidiyorsa 3600sn (yani 1 saatte) 1800000cm ilerler. bunu 100000 e bölersek (1 km 1000m yani 100000cm dir) hız 18km/saat bulunmuş olur.
ilgili dosyada MOT_THST_HOVER: 0.1476935 olarak kayıtlıdır. buna göre;
cihaz %14.7 thrust da hover yapabilmetedir. aslında kabul edilen sınır 0.2-0.8 dir.
Bu LİNKİ görmek için izniniz yok. Giriş yap veya üye ol
bu da multinizin çok güçlü olduğunun göstergesidir.mission planner kendi bünyesinde tlog dosyasından cihazın uçuşu ile ilgili .param dosyasını extrakte edecek araçlarla gelmektedir.
ilgili dosyada FRAME_CLASS 2 olarak kayıtlıdır. kullandığınız frame hakikaten hexa dır. düzeltme için teşekkür ederim. bir şekilde dikkatimden kaçtı.
ilgili dosyada FS_BATT_VOLTAGE: 10.5 olarak kayıtlıdır. bu değer 3s lipo kullananlar için uygundur. bu değer ile battery failsafe çok geç devreye gireceğinden ciddi sorun yaşama ihtimali bulunuyor. en kısa zamanda bunu 14 olarak değiştirmeyi düşünmelisiniz.
ilgili dosyada FS_BATT_MAH: 0 olarak kayıtlıdır. akım sensörü yoksa bir diyeceğim yok ancak sisteme kayıtlı ve kalibre edilmiş akım sensörü varsa bu total lipo kapasitenin en az %20 si olarak yani 1600 olarak kayıt edilmesini düşünmelisiniz.
ilgili dosyada MOT_SPIN_ARM 0 olarak kayıtılıdır. arm olduğu zaman pervanelerin dönmesini görmek güvenlik için iyi bir seçenektir. bu bakımdan bu değerin 0.10 civarına ayarlanmasını düşünmelisiniz. arm olduğunda zaten dönüyor dediğinizi duyar gibiyim. nedeni RC3_MIN 1065 ayarlı olduğu içindir.
genel anlamda oldukça iyi konfigüre edilmiş bir cihaz bu yüzden tebriklerimi lütfen kabul buyurun.
sevgi ve saygılarımla
şakir polay