Arkadaşlar merhabalar. Türkiyede mevcut stokta bulunan uygun fiyatlı malzemeler ile bir drone toplamaya çalıştım malzemeler şu şekilde:
->Speedybee f405 V3 - V4 ,
->Brotherhobby 2807 1300KV,
->6s 5200mAh 25C Lİ-PO Forceup,
->7X4X3 7040 3 Bıçak,
->Geprc mark4 7" frame
-> TBS M10Q gps
-> toplam ağırlığı 1100 gram civarı
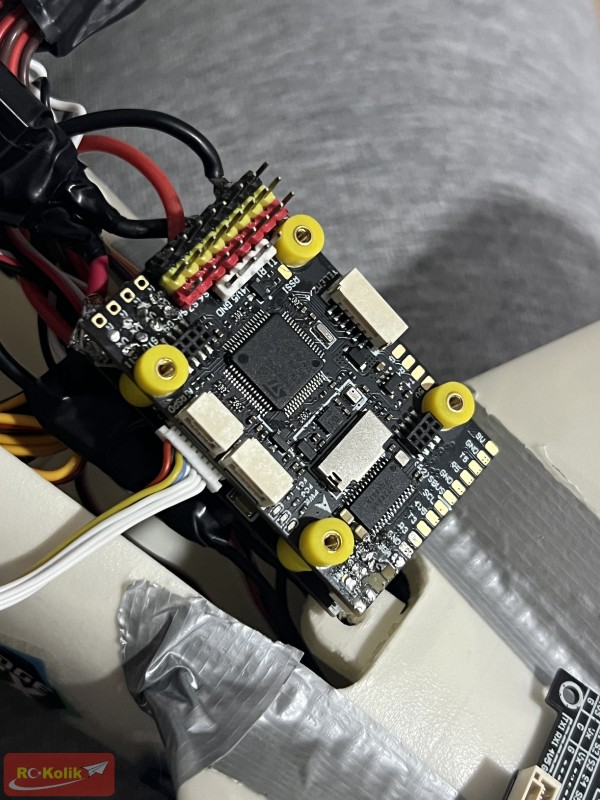
Speedybee F405 uçuş kontrol kartına betaflight yüklediğimde default ayarlar ve parametrelerde titreşimsiz (uçuşa engel olmayacak) uçuş yapabiliyordu. Otonom kontrol üzerine çalışacağım için ardupilot yükledim. ESC'ler FC nin kendi ESC si, ardupilot yükleyip parametre ayarlamalarını yaptıktan sonra STABİLİZE modda çapraz olarak (A ve C motorlarında) çok fazla titreme oldu. Çözmek için çok uğraştım öncelikle ESC yapılandırması üzerinde durdum ESC tipini normalde denedim olmadı, BLE_HELİ32 vs.de DSHOOT 300 / 600 / 1200 de, denedim yine olmadı, PID ayarları üzerinde durdum olmadı, pilde 3s ve 4s ile deneyip "ininitial parameter set kısmında (mission planner'de) pil değerlerini güncelleyip "calculate initial parameter" kısmındaki parametreleri gönderidğimde titreşim kesildi ve uçuşta sorun kalmadı . aynı işlemi 6s pilde yaptım titreşim hala devam etmekte. "
->Speedybee f405 V3 - V4 ,
->Brotherhobby 2807 1300KV,
->6s 5200mAh 25C Lİ-PO Forceup,
->7X4X3 7040 3 Bıçak,
->Geprc mark4 7" frame
-> TBS M10Q gps
-> toplam ağırlığı 1100 gram civarı
Speedybee F405 uçuş kontrol kartına betaflight yüklediğimde default ayarlar ve parametrelerde titreşimsiz (uçuşa engel olmayacak) uçuş yapabiliyordu. Otonom kontrol üzerine çalışacağım için ardupilot yükledim. ESC'ler FC nin kendi ESC si, ardupilot yükleyip parametre ayarlamalarını yaptıktan sonra STABİLİZE modda çapraz olarak (A ve C motorlarında) çok fazla titreme oldu. Çözmek için çok uğraştım öncelikle ESC yapılandırması üzerinde durdum ESC tipini normalde denedim olmadı, BLE_HELİ32 vs.de DSHOOT 300 / 600 / 1200 de, denedim yine olmadı, PID ayarları üzerinde durdum olmadı, pilde 3s ve 4s ile deneyip "ininitial parameter set kısmında (mission planner'de) pil değerlerini güncelleyip "calculate initial parameter" kısmındaki parametreleri gönderidğimde titreşim kesildi ve uçuşta sorun kalmadı . aynı işlemi 6s pilde yaptım titreşim hala devam etmekte. "
Bu LİNKİ görmek için izniniz yok. Giriş yap veya üye ol
,
Bu LİNKİ görmek için izniniz yok. Giriş yap veya üye ol
,
Bu LİNKİ görmek için izniniz yok. Giriş yap veya üye ol
,
Bu LİNKİ görmek için izniniz yok. Giriş yap veya üye ol
" parametreleriyle oynadığımda sarsıntı biraz kesilsede hala uçuşa engel olacak kadar bir titreme var, 3s - 4s pilde ise tam tersi çok stabil. Daha önce 6s pil ile bu kontrol kartında ardupilot kullanan var mı? sizce sorunun kaynağı ne olabilir? elimde F405 kartın her iki versiyonu da mevcut ve 2 karttada aynı problem var.- Kontrol Kartınız
- Speedybee F405
- Model Sınıfı
- FPV
- Motor, Pervane ve ESC
- brotherhobby 1300 KV, 7040 pervane , speedybee esc
- Kumanda Alıcı ve Verici
- Flysky
- Extra Ekipman
- GPS