Merhabalar
Arduino ile Multiwii 2,4 kullanarak Multicopter yapmaya çalışıyorum. Daha önce hiç tercübem olmadı ve hatta hiç Multicopter dahi uçurmadım. Bir heves başladım, sona geldiğimi düşünüyorum ama sonunu getiremiyorum.
Paylaştığım videolardan da göreceğiniz gibi her şey tamam gibi ancak Multi copter ARM oluyor ama gaz kelebeği çalışmasına rağmen motor çalışmıyor.
Videoları kısa tutup 5 parça halinde yayınlıyorum, videolar bayağı amatör oldu kusura bakmayın, ama konuyu özetlemiştir. Konu hakkında bilgi verebilecek arkadaşların değerli paylaşımlarını bekliyorum.
Multi copter Açılış
Multi copter Ez-gui bağlantısı
Multi copter Kalibrasyon
Multi copter Motor Testi
Multi copter Kumanda Testi ve Motor çalışmama Sorunu
Arduino ile Multiwii 2,4 kullanarak Multicopter yapmaya çalışıyorum. Daha önce hiç tercübem olmadı ve hatta hiç Multicopter dahi uçurmadım. Bir heves başladım, sona geldiğimi düşünüyorum ama sonunu getiremiyorum.
Paylaştığım videolardan da göreceğiniz gibi her şey tamam gibi ancak Multi copter ARM oluyor ama gaz kelebeği çalışmasına rağmen motor çalışmıyor.
Videoları kısa tutup 5 parça halinde yayınlıyorum, videolar bayağı amatör oldu kusura bakmayın, ama konuyu özetlemiştir. Konu hakkında bilgi verebilecek arkadaşların değerli paylaşımlarını bekliyorum.
Bu RESMİ görmek için izniniz yok. Giriş yap veya üye ol
Multi copter Açılış
Bu VIDEOYU görmek için izniniz yok. Giriş yap veya üye ol
.Multi copter Ez-gui bağlantısı
Bu VIDEOYU görmek için izniniz yok. Giriş yap veya üye ol
Multi copter Kalibrasyon
Bu VIDEOYU görmek için izniniz yok. Giriş yap veya üye ol
Multi copter Motor Testi
Bu VIDEOYU görmek için izniniz yok. Giriş yap veya üye ol
Multi copter Kumanda Testi ve Motor çalışmama Sorunu
Bu VIDEOYU görmek için izniniz yok. Giriş yap veya üye ol
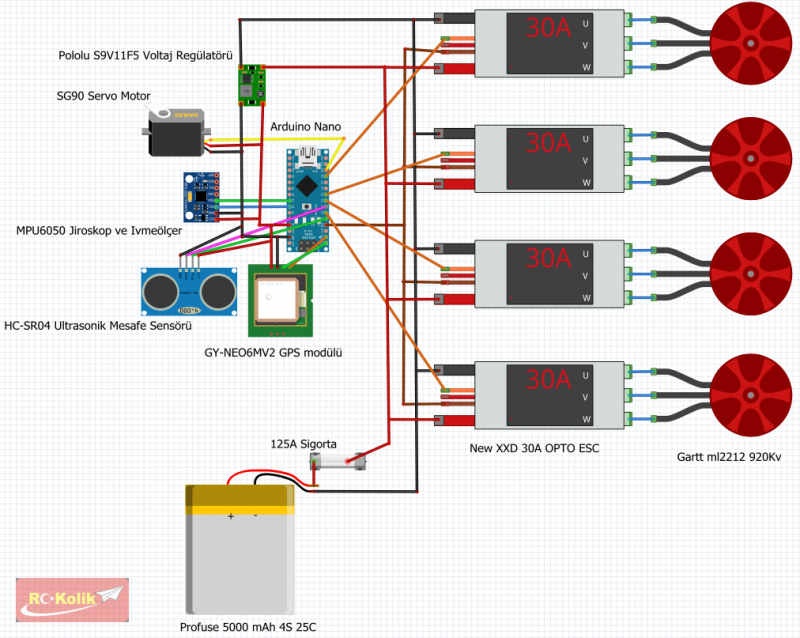
- Kontrol Kartınız
- Arduino nano, GY-89
- Model Sınıfı
- QUADX
- Motor, Pervane ve ESC
- 2200 KV motor, 30A ESC
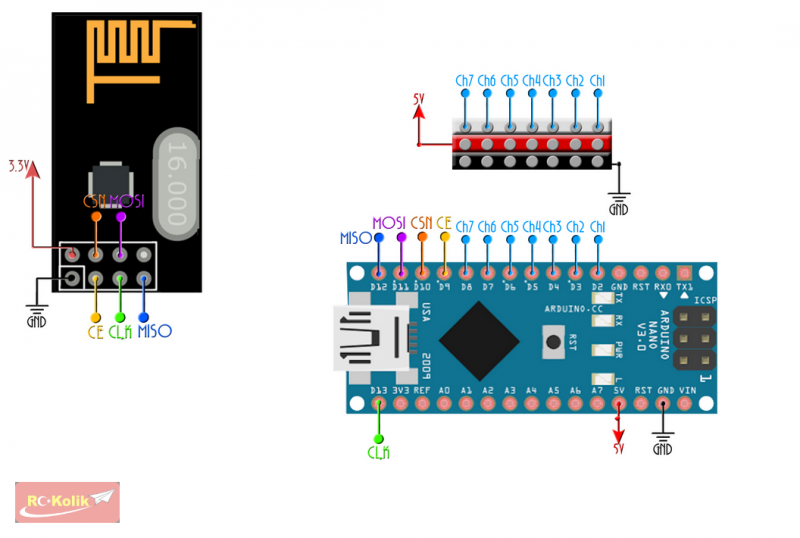
- Kumanda Alıcı ve Verici
- Ardunio nano ile NRF24L01 Alıcı verici
- Extra Ekipman
- GY-89 (LSM303D, L3GD20 ve BMP180)